1ĪóĖ▀┐šū„śI▄ć
1.ĘųŅÉ
░┤╔Ž▄ć▓┐ĘųĄ─╔²ĮĄÖCśŗĄ─ą═╩ĮŻ¼Ė▀┐šū„śI▄ć┐╔äØĘų×ķ╦─ĘN╗∙▒Šą═╩ĮŻ¼ęŖłDĪŻ
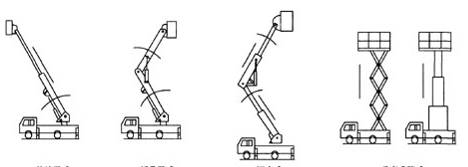
ŻßŻ«╔ņ┐s▒█╩Į ŻŌŻ«š█»B▒█╩Į ŻŃŻ«╗ņ║Ž▒█╩Į ŻõŻ«┤╣ų▒╔²ĮĄ╩Į
łD7-9 │Żė├Ė▀┐šū„śI▄ćą═╩Į
1Ż®╔ņ┐s▒█╩Į
Ė▀┐šū„śI▄ćĖ„╣żū„▒█ų«ķgĄ─ŽÓī”▀\äėų╗─▄▀Mąą╔ņ┐sĪŻ
╠ž³cŻ║ĮYśŗ▌^Å═ļsŻ¼▓┘ū„║åå╬ų▒ė^Ż¼ĮYśŗŠo£ÉŻ¼ÖCäėąį║├Ż¼ū„śIĘČć·┤¾Ż¼╗ž▐DĢrš╝ė├┐šķgąĪŻ¼┐ńįĮšŽĄK─▄┴”ŽÓī”▌^▓ŅĪŻ

łD7-10╔ņ┐s▒█╩ĮĖ▀┐šū„śI▄ć
Ż©2Ż®š█»B▒█╩Į
Ė▀┐šū„śI▄ć╣żū„▒█ų«ķgĄ─▀BĮė╚½▓┐▓╔ė├ŃqĮėą═╩ĮĪŻ╦∙ęįėų░č▀@ĘNĖ▀┐šū„śI▄ćĮąū÷ŃqĮė╩ĮĖ▀┐šū„śI▄ćĪŻ
╠ž³cŻ║ĮYśŗ▒╚▌^║åå╬Ż¼┐ńįĮšŽĄK─▄┴”ÅŖŻ¼┐╔ĦŲųž╣”─▄Ż¼╗ž▐DĢrš╝ė├┐šķg┤¾Ż¼▓┘ū„▒╚▌^Ę▒¼ŹĪŻ

łD7-11 š█»B▒█╩ĮĖ▀┐šū„śI▄ć
Ż©3Ż®╗ņ║Ž▒█╩Į
Ė▀┐šū„śI▄ć╣żū„▒█ų«ķg╝╚ėąŃqĮėŻ¼ę▓ėą╔ņ┐sĪŻłDųą╔ŽĪóŽ┬╣żū„▒█┐╔╔ņ┐sŻ¼╔Ž╣żū„▒█┼cŽ┬▒█ŃqĮėĪŻ
╠ž³cŻ║ĮYśŗÅ═ļsČÓūāŻ¼ŽÓī”Šo£ÉŻ¼▓┘ū„▌^║åå╬ų▒ė^Ż¼┐ńįĮšŽĄK─▄┴”║▄ÅŖŻ¼┐╔ęįīŹ¼F╠žČ©╣”─▄ĪŻ

łD7-12╗ņ║Ž▒█╩ĮĖ▀┐šū„śI▄ć
Ż©4Ż®┤╣ų▒╔²ĮĄ╩Į
Ė▀┐šū„śI▄ć╔²ĮĄÖCśŗŲõįŁ└Ē┼cÖz▓ķĢrĖ▀┐šū„śIŲĮ┼_ŽÓ═¼Ż¼ų╗─▄į┌┤╣ų▒ĘĮŽ“╔Ž▀Mąą▀\äėŻ¼▒ŠĢ°▓╗ū„ųž³cĮķĮBĪŻ
╠ž³cŻ║ĮYśŗ║åå╬ārĖ±Ą═Ż¼│ą▌d─▄┴”┤¾Ż¼ū„śIĖ▀Č╚Ą═Ż¼ū„śIĘČć·╩▄Ž▐ųŲĪŻ

łD7-13┤╣ų▒╔²ĮĄ╩ĮĖ▀┐šū„śI▄ć
░┤ššĮ^Šēąį─▄ĘųŅÉŻ║
Ż©1Ż®Į^Šēą═
╣żū„ŲĮ┼_Īó▓┐Ęų╣żū„▒█▓╔ė├Į^Šē▓─┴ŽŻ©ę╗░Ń×ķ▓Ż┴¦õōŻ®ųŲū„Ż¼╣żū„ŲĮ┼_║═┤¾Ąžų«ķgūĶ┐╣║▄┤¾ĪŻū„śI▄ć┐╔ęįį┌Ė▀ē║ŠĆ┬Ę╔ŽÄ¦ļŖū„śIĪŻĮ^Šēą═Ė▀┐šū„śI▄ćę╗░Ńė├ė┌ļŖ┴”įO╩®Ą─ĦļŖōīą▐║═ŠSūoĪŻ

łD7-14 Į^Šēą═Ė▀┐šū„śI▄ć
Ż©2Ż®ĘŪĮ^Šēą═
ū„śI▄ć▓╗Š▀éõĮ^Šē╣”─▄Ż¼▓╗─▄▀MąąÄ¦ļŖ╣żū„Ż¼Ė▀┐šū„śIĢrąĶę¬▀hļxĖ▀ē║ĦļŖ¾wĪŻĘŪĮ^ŠēĖ▀┐šū„śI▄ćŻ║ÅVĘ║ė├ė┌╩ąš■ĪóļŖ┴”ĪóĮ╗═©Īół@┴ųĪóļŖą┼ĪóĖ█┐┌Īóė═╠’Īó’LļŖĪóūāļŖšŠĪóÅVĖµ░▓čbĪóŲ¾╩┬śIå╬╬╗Ą╚ĪŻ

łD7-15ĘŪĮ^ŠēĖ▀┐šū„śI▄ć
2.╗∙▒ŠįŁ└Ē
Ė▀┐šū„śI▄ć▓╔ė├Č©ą═╔·«aĄ─Ų¹▄ćĄū▒Pū„×ķąąū▀ÖCśŗŻ¼īŹ¼Fąąū▀Ż©▐Dł÷Ż®║═▀\▌d╣”─▄ĪŻ│²Ų¹▄ćĄū▒P═ŌŻ¼×ķīŹ¼FĖ▀┐šū„śI╣”─▄Ż¼Ė▀┐šū„śI▄ćĄ─śŗ│╔▀Ć░³└©äė┴”ŽĄĮyĪó╣żū„ÖCśŗĪóÖCąĄĮYśŗĪóę║ē║║═ļŖÜŌ┐žųŲŽĄĮyęį╝░░▓╚½čbų├Äū▓┐ĘųĪŻ
╩╣ė├Ų¹▄ćĄū▒Pū„×ķąąū▀ÖCśŗŻ¼╩╣Ė▀┐šū„śI▄ćŠ▀ėą┴╦Ųõ╦³ĘNŅÉĖ▀┐šū„śIŲĮ┼_╦∙▓╗Š▀éõĄ─Ė▀ÖCäėąį─▄Ż¼Å─Č°Š▀ėą┐ņ╦┘▐Dł÷─▄┴”ĪŻŲ¹▄ćĄū▒P░läėÖCĄ─äė┴”ÅŖ┤¾Ż¼ę▓╩ŪĖ▀┐šū„śI▄ćīŹ¼FĖ▀┐šū„śI╣”─▄Ą─ų„äė┴”į┤ĪŻ
Ė▀┐šū„śI▄ćäė┴”ŽĄĮyę╗░ŃųĖīŹ¼FĖ▀┐šū„śI╦∙ąĶꬥ──▄į┤ĪŻĖ▀┐šū„śI▄ć═©│Ż╩╣ė├Ų¹▄ćĄū▒P░läėÖCū„×ķäė┴”į┤Ż¼═©▀^╚Ī┴”ŽĄĮyīóĄū▒P░läėÖCĄ─▓┐Ęųäė┴”╚Ī│÷Ż¼ė├ęį“īäėĖ▀┐šū„śI▄ćĄ─╣żū„ÖCśŗ║═╔ņš╣ĮYśŗĪŻ▀@ĘNŪķørŽ┬Ż¼Ąū▒PĪó░läėÖCĪó╚Ī┴”čbų├ęį╝░┐žųŲ╚Ī┴”čbų├╣żū„╗“öÓķ_Ą─╚Ī┴”┐žųŲŽĄĮyśŗ│╔┴╦Ė▀┐šū„śI▄ćĄ─äė┴”ŽĄĮyĪŻ│²╩╣ė├Ąū▒P░läėÖCū„×ķäė┴”į┤═ŌŻ¼ę▓ėą╔┘▓┐Ęų▄ćą═╩╣ė├å╬¬ÜĄ─░läėÖC╗“╩╣ė├ąŅļŖ│žū„×ķäė┴”į┤ĪŻ
╣żū„ÖCśŗ╩Ū×ķīŹ¼FĖ▀┐šū„śI▓╗═¼▀\äėę¬Ū¾Č°įOų├Ą─ĪŻę¬╩╣čb▌d╣żū„╚╦åT║═╣żŠ▀Ą─╣żū„ŲĮ┼_Å──│ę╗╬╗ų├▀\äėĄĮ┐šųą╚╬ę╗╬╗ų├Ż¼╣żū„ŲĮ┼_ę¬─▄īŹ¼F┤╣ų▒ĘĮŽ“║═ā╔éĆ╦«ŲĮĘĮŽ“Ą─▀\äėĪŻ×ķīŹ¼F╚²éĆĘĮŽ“Ą─▀\äė▓ó▒ŻūCŲĮ┼_▀\ąą▀^│╠ųą╩╝ĮK▓╗░l╔·āAą▒Ż¼Ė▀┐šū„śI▄ćįOėąūāĘ∙ÖCśŗĪó╔ņ┐sÖCśŗĪó╗ž▐DÖCśŗ║═š{ŲĮÖCśŗĪŻūāĘ∙ÖCśŗę▓┐╔▒╗Įąū÷Ė®č÷ÖCśŗŻ¼Ė▀┐šū„śI▄ćĄ─ūāĘ∙╩ŪųĖĖ─ūā╣żū„ŲĮ┼_┼c╗ž▐Dųąą─▌SŠĆų«ķgĄ─ŠÓļxŻ¼╝┤Ę∙Č╚ĪŻĖ▀┐šū„śI▄ćĄ─ūāĘ∙ÖCśŗę╗░Ń▓╔ė├ę║ē║ė═Ėū═Ųäė╣żū„▒█Ė─ūā╣żū„▒█║═╦«ŲĮ├µŖAĮŪīŹ¼FūāĘ∙ĪŻ╔ņ┐sÖCśŗīŹ¼FĖ▀┐šū„śI▄ćŽÓ╗ź╠ū»BĄ─╣żū„▒█Ą─╔ņ│÷╗“┐s╗žŻ¼Ė─ūā╣żū„▒█Ą─ķLČ╠ĪŻ╣żū„▒█ąą±éĀŅæB┐sį┌╗∙▒Š▒█ā╚Ż¼▓╗ė░ĒæĖ▀╦┘ąą±éŻ¼╣żū„Ģr╔ņ│÷▀_ĄĮ╦∙ąĶķLČ╚ĪŻ╔ņ┐sÖCśŗę╗░Ń▓╔ė├ę║ē║ė═Ėū┼õ║ŽõōĮz└K╗¼▌åĮM╗“µ£Ślµ£▌åĮMĄ─═¼▓Į╔ņ┐sĪŻ╗ž▐DÖCśŗ╩Ū×ķīŹ¼FĖ▀┐šū„śI▄ćĄ─╗ž▐D▀\äėČ°įOų├Ą─ÖCśŗĪŻĖ▀┐šū„śI▄ćĄ─ę╗▓┐ĘųŻ©ę╗░ŃųĖ╔Ž▄ć▓┐Ęų╗“╗ž▐D▓┐ĘųŻ®ŽÓī”┼c┴Ēę╗▓┐ĘųŻ©ę╗░ŃųĖŽ┬▄ć▓┐Ęų╗“ĘŪ╗ž▐D▓┐ĘųŻ®ū÷ŽÓī”Ą─ą²▐D▀\äėĘQ×ķ╗ž▐DĪŻć°ā╚Ė▀┐šū„śI▄ć╗ž▐DĘČć·ę╗░Ń×ķ╚½╗ž▐DŻ©╗ž▐DŻ│ŻČŻ░ºęį╔ŽŻ®ĪŻš{ŲĮÖCśŗ╩ŪĖ▀┐šū„śIŲĮ┼_Ą─īŻėąÖCśŗŻ¼╩Ūė├ęįīŹ¼F╣żū„▒█ūāĘ∙Ż¼╣żū„▒█║═╦«ŲĮ├µŖAĮŪ▓╗öÓūā╗»ĢrŻ¼╣żū„ŲĮ┼_║═Ąž├µŖAĮŪ╩╝ĮK▓╗ūāŻ¼▒ŻūC╣żū„╚╦åTø]ėąāAĖ▓╬ŻļUĪŻ
Ė▀┐šū„śI▄ćÖCąĄĮYśŗ░³└©╣żū„▒█Īó╗ž▐DŲĮ┼_ĪóĖ▒▄ć╝▄Ż©▄ć╝▄┤¾┴║Ż¼ķT╝▄Īóų¦═╚Ą╚Ż®Ą╚ĪŻ╔ņš╣ĮYśŗ╩ŪĖ▀┐šū„śI▄ćĄ─╣Ū╝▄ĪŻ╦³│ą╩▄Ė▀┐šū„śI▄ćĄ─ūįųžęį╝░ū„śIĢrĄ─Ė„ĘN═Ō▌d║╔ĪŻĖ„╣żū„ÖCśŗĄ─┴Ń▓┐╝■Č╝╩Ū░▓čb╗“ų¦│ą▀@éĆ╣Ū╝▄╔ŽĄ─ĪŻ
ę║ē║║═ļŖÜŌ┐žųŲŽĄĮyė├ė┌īŹ¼F╣żū„ÖCśŗĄ─▀\äėŻ¼╚ńäė┴”é„▀fĄ─ĘĮŽ“Ż¼ÖCśŗ▀\äė╦┘Č╚┐ņ┬²Ż¼ęį╝░ÖCśŗŲ═ŻĄ╚ĪŻ═©▀^ę║ē║“īäė║═ļŖÜŌŽĄĮyĄ─┐žųŲŻ¼īŹ¼FĖ▀┐šū„śI▄ćĖ„ÖCśŗĄ─ŲäėĪóš{╦┘ĪóōQŽ“║══Żų╣Ż¼Å─Č°▀_ĄĮĖ▀┐šū„śIę¬Ū¾Ą─Ė„ĘNäėū„ĪŻ
2ĪóĖ▀┐šū„śIŲĮ┼_
Ė▀┐šū„śIŲĮ┼_╩Ūė├ė┌Ė▀┐šū„śIĪóįOéõ░▓čbĪóÖzą▐Ą╚┐╔ęŲäėąįĖ▀┐šū„śIĄ─«aŲĘĪŻ
1.ĘųŅÉ
ų„ꬫaŲĘėąŻ║╝¶▓µ╩ĮĖ▀┐šū„śIŲĮ┼_ĪóŪ·▒█╩ĮĖ▀┐šū„śIŲĮ┼_Īóūįąą╩ĮĖ▀┐šū„śIŲĮ┼_ĪóõX║ŽĮĖ▀┐šū„śIŲĮ┼_ĪóĘ└▒¼Ė▀┐šū„śIŲĮ┼_Īó═Ž└ŁęŲäė╩ĮĖ▀┐šū„śIŲĮ┼_ĪóļŖäėĖ▀┐šū„śIŲĮ┼_Īóūįąąū▀ų▒▒█Ė▀┐šū„śIŲĮ┼_ĪóįĮę░╩ĮĖ▀┐šū„śIŲĮ┼_Īó╚½Ž“ūįąąū▀Ė▀┐šū„śIŲĮ┼_Ż║
2.╣żū„įŁ└Ē
ę║ē║ė═ė╔╚~Ų¼▒├ą╬│╔ę╗Č©Ą─ē║┴”Ż¼Įø×Vė═Ų„ĪóĖ¶▒¼ą═ļŖ┤┼ōQŽ“ķyĪó╣Ø┴„ķyĪóę║┐žå╬Ž“ķyĪóŲĮ║Ōķy▀M╚ļę║ĖūŽ┬Č╦Ż¼╩╣ę║ĖūĄ─╗Ņ╚¹Ž“╔Ž▀\äėŻ¼╠ß╔²ųž╬’Ż¼ę║Ėū╔ŽČ╦ę║ē║ė═ĮøĖ¶▒¼ą═ļŖ┤┼ōQŽ“ķy╗žĄĮė═ŽõŻ¼ŲõŅ~Č©ē║┴”═©▀^ęń┴„ķy▀Mąąš{š¹Ż¼═©▀^ė^▓ņē║┴”▒ĒūxöĄųĄĪŻ
ę║ĖūĄ─╗Ņ╚¹Ž“Ž┬▀\äėŻ©╝╚ųž╬’Ž┬ĮĄŻ®ĪŻę║ē║ė═ĮøĘ└▒¼ą═ļŖ┤┼ōQŽ“ķy▀M╚ļę║Ėū╔ŽČ╦Ż¼ę║ĖūŽ┬Č╦╗žė═ĮøŲĮ║ŌķyĪóę║┐žå╬Ž“ķyĪó╣Ø┴„ķyĪóĖ¶▒¼ą═ļŖ┤┼ōQŽ“ķy╗žĄĮė═ŽõĪŻ×ķ╩╣ųž╬’Ž┬ĮĄŲĮĘĆŻ¼ųŲäė░▓╚½┐╔┐┐Ż¼į┌╗žė═┬Ę╔ŽįOų├ŲĮ║ŌķyŻ¼ŲĮ║Ō╗ž┬ĘĪó▒Ż│ųē║┴”Ż¼╩╣Ž┬ĮĄ╦┘Č╚▓╗╩▄ųž╬’Č°ūā╗»Ż¼ė╔╣Ø┴„ķyš{╣Ø┴„┴┐Ż¼┐žųŲ╔²ĮĄ╦┘Č╚ĪŻ ×ķ╩╣ųŲäė░▓╚½┐╔┐┐Ż¼Ę└ų╣ęŌ═ŌŻ¼į÷╝ėę║┐žå╬Ž“ķyŻ¼╝┤ę║ē║µiŻ¼▒ŻūCį┌ę║ē║╣▄ŠĆęŌ═Ō▒¼┴čĢr─▄░▓╚½ūįµiĪŻ░▓čb┴╦│¼▌d┬Ģ┐žł¾Š»Ų„Ż¼ė├ęįģ^äe│¼▌d╗“įOéõ╣╩šŽĪŻ
2.ų„ę¬ĮYśŗ║═╠ž³c
Ż©1Ż®╝¶▓µ╩Į
╝¶▓µ╩ĮĖ▀┐šū„śIŲĮ┼_╩Ūė├═ŠÅVĘ║Ą─Ė▀┐šū„śIīŻė├įOéõĪŻ╦³Ą─╝¶▓µ╩ĮÖCąĄĮYśŗŻ¼╩╣╔²ĮĄ┼_Ų╔²║¾ėą▌^Ė▀Ą─ĘĆČ©ąįŻ¼īÆ┤¾Ą─ū„śIŲĮ┼_║═▌^Ė▀Ą─│ą▌d─▄┴”Ż¼╩╣Ė▀┐šū„śIĘČć·Ė³┤¾Ż¼▓ó▀m║ŽČÓ╚╦═¼Ģrū„śIĪŻ╦³╩╣Ė▀┐šū„śIą¦┬╩Ė³Ė▀Ż¼Ė³░▓╚½ĪŻ
╠ž³cŻ║┼e╔²ÖCśŗ▓╔ė├Ė▀ÅŖČ╚ÕiõōŌĀą╬╣▄ųŲū„ĪŻįOėąĘ└ų╣╔²ĮĄ┼_│¼▌dĄ─░▓╚½▒Żūočbų├ĪŻįOėąĘ└ų╣ę║ē║╣▄┬ĘŲŲ┴čĄ─░▓╚½▒ŻūoķyĪŻįOėą═ŻļŖŪķørŽ┬Ą─æ¬╝▒Ž┬ĮĄčbų├ĪŻĖ∙ō■▓╗═¼ę¬Ū¾┐╔▀xō±▓╗═¼äė┴”ą╬╩ĮŻ©╚ńŻ║╚²ŽÓĮ╗┴„ļŖį┤Īóå╬ŽÓĮ╗┴„ļŖį┤Īóų▒┴„ļŖį┤║═ā╚╚╝äė┴”Ą╚Ż®Ż¼╝ė┼õ╔Ž╩ųäėę║ē║čbų├Ż¼┐╔į┌═ŻļŖ╗“¤oļŖį┤ł÷╦∙šš│Ż╔²ĮĄ╣żū„Ż¼▓ó┐╔╝ė╔ņ┐sŲĮ┼_Ż¼į┌ŲĮ┼_ķLČ╚▓╗ūŃĢr┐╔čė╔ņų┴╦∙ąĶ╬╗ų├Ż¼Å─Č°╠ßĖ▀╣żū„ą¦┬╩ĪŻ

łD7-2 ╝¶▓µ╩ĮĖ▀┐šū„śIŲĮ┼_
Ż©2Ż®Ū·▒█╩Į
Ū·▒█╩ĮĖ▀┐šū„śIŲĮ┼_ĮąĖ▀┐šū„śIŲĮ┼_▄ćŻ¼ų„ę¬ė├ė┌▒╚▌^Ė▀Ą─ū„śIŁhŠ│Ż¼│ą▌dę╗éĆ╚╦ĄĮā╔éĆ╚╦ų«ķgŻ¼Ž¹Ę└ĻĀŲš▒ķ╩╣ė├▀@ĘN╔²ĮĄÖCĪŻėą▓±ė═ÖCūįąą╩ĮĪóļŖŲ┐ūįąą╩Į┼c═Ž▄ć╩Į╚²ĘNäė┴”ą╬╩ĮŻ¼Š▀ėą╔ņ┐s▒█Ż¼─▄æę╔ņū„śIŻ¼─▄ē“┐ńįĮę╗Č©Ą─šŽĄK╗“į┌ę╗╠Ä╔²ĮĄ▀MąąČÓ³cū„śIŻ╗360Č╚ą²▐DŻ¼ŲĮ┼_▌dųž┴┐┤¾Ż¼┐╔╣®ā╔╚╦╗“ČÓ╚╦═¼Ģrū„śI▓ó┐╔┤Ņ▌dę╗Č©Ą─įOéõŻ╗╔²ĮĄŲĮ┼_ęŲäėąį║├Ż¼▐DęŲł÷ĄžĘĮ▒ŃŻ╗═Ōą═├└ė^Ż¼▀mė┌╩ęā╚═Ōū„śI║═┤µĘ┼ĪŻ▀mė├ė┌▄暊Īó┤aŅ^Īó╔╠ł÷Īó¾wė²ł÷^ĪóąĪģ^╬’śIĪóÅSĄV▄ćķgĄ╚┤¾ĘČć·ū„śIĪŻ

łD7-3Ū·▒█╩ĮĖ▀┐šū„śIŲĮ┼_
(3)ūįąą╩Į
╔²ĮĄ┼_ūį╔ĒŠ▀ėąąąū▀╝░▐DŽ““īäė╣”─▄Ż¼▓╗ąĶ╚╦╣żĀ┐ę²Ż¼▓╗ąĶ═ŌĮėļŖį┤ ęŲäėņ`╗ŅĘĮ▒ŃŻ¼┴ŅĖ▀┐šū„śIĖ³ĘĮ▒Ń┐ņĮ▌Ż¼╩Ū¼F ┤·Ų¾śIĖ▀ą¦░▓╚½╔·«aų« └ĒŽļĖ▀┐šū„śIįOéõĪŻ▌oų·ūįąąū▀╩ĮŽĄ┴ą╔²ĮĄÖCŻ¼Š▀ėąūįäėąąū▀╣”─▄Ż¼─▄ē“į┌▓╗═¼╣żū„ĀŅæBŽ┬Ż¼▓╗ąĶ═ŌĮėļŖį┤Ż¼▓╗ąĶ═ŌüĒäė┴”Ā┐ę²Ż¼ęŲäėņ`╗ŅĪó▓┘ū„ĘĮ▒ŃĪó╔²ĮĄūį╚ńŻ¼ų╗ąĶę╗╚╦▒Ń┐╔═Ļ│╔Ū░▀MĪó║¾═╦ĪŻ╠žäe▀m║Žė┌ÖCł÷║“ÖCśŪĪó▄暊Īó┤aŅ^Īó╔╠ł÷Īó¾wė²ł÷^ĪóąĪģ^╬’śIĪóÅSĄV▄ćķgĄ╚▌^┤¾ĘČć·Ą─ū„śIĪŻ

łD7-4 ūįąą╩ĮĖ▀┐šū„śIŲĮ┼_
Ż©4Ż®õX║ŽĮ╬”ų∙╩Į
õX║ŽĮęŲäė╩ĮŲĮ┼_┤·▒Ēėąå╬┴óų∙õX║ŽĮ╔²ĮĄÖCŻ¼ļp┴óų∙õX║ŽĮ╔²ĮĄÖCŻ¼╚²┴óų∙õX║ŽĮ╔²ĮĄÖCŻ¼╦─┴óų∙õX║ŽĮ╔²ĮĄÖCĪŻę╗░Ń▀mė├ė┌1ŻŁ2╚╦ĄŪĖ▀ū„śIŻ¼å╬ų∙Ė▀Č╚į┌10├ūęįŽ┬Ż¼ļpų∙ę╗░Ńį┌12├ūęįŽ┬Ż¼ČÓų∙Ė▀Č╚┐╔ęį▀_ĄĮ20├ūū¾ėęĪŻ▓╔ė├╬”ų∙╩ĮĮYśŗŻ¼▌dųž┴┐┤¾Ż¼ŲĮ┼_├µĘe┤¾Ż¼ĘĆČ©ąįśO║├Ż¼▀\▐Dņ`╗ŅŻ¼ÅVĘ║ė├ė┌╣żÅSĪó┘e^Īó▓═ÅdĪó▄暊ĪóÖCł÷ė░äĪį║Īóš╣ė[^Ą╚ł÷╦∙Ż¼╩Ū▒ŻBÖCŠ▀Īóė═Ųßčbą▐Īóš{ōQ¤¶Š▀ĪóļŖŲ„ĪóŪÕØŹ▒ŻBĄ╚ĪŻ
░┤šš┴óų∙öĄ┴┐┐╔Ęų×ķŻ║å╬┴óų∙õX║ŽĮĖ▀┐šū„śIŲĮ┼_Īóļp┴óų∙õX║ŽĮĖ▀┐šū„śIŲĮ┼_Īó╚²┴óų∙õX║ŽĮĖ▀┐šū„śIŲĮ┼_Īó╦─┴óų∙õX║ŽĮĖ▀┐šū„śIŲĮ┼_:
░┤ššąį─▄┐╔Ęų×ķŻ║ęŲäė╩ĮõX║ŽĮĖ▀┐šū„śIŲĮ┼_Īó╣╠Č©╩ĮõX║ŽĮĖ▀┐šū„śIŲĮ┼_╔ņ┐s┼_├µõX║ŽĮĖ▀┐šū„śIŲĮ┼_Īóš█»B╩ĮõX║ŽĮĖ▀┐šū„śIŲĮ┼_ĪŻ
   
ŻßŻ«å╬┴óų∙ ŻŌŻ«ļp┴óų∙ ŻŃŻ« ╚²┴óų∙ ŻõŻ«╦─┴óų∙
łD7-5 ╬”ų∙╩ĮŲĮ┼_Ż©░┤šš┴óų∙öĄ┴┐ĘųŅÉŻ®
Ż©5Ż®╠ūĖū╩Į
╠ūĖū╩ĮĖ▀┐šū„śIŲĮ┼_×ķČÓ╝ēę║ē║Ėūų▒┴ó╔Ž╔²Ż¼ę║ē║ĖūĖ▀ÅŖČ╚Ą─▓─┘|║═┴╝║├Ą─ÖCąĄąį─▄Ż¼╦■ą╬╠▌ĀŅūo╝▄Ż¼╩╣╔²ĮĄ┼_ėąĖ³Ė▀Ą─ĘĆČ©ąįĪŻ╝┤╩╣╔Ē╠Ä20├ūĖ▀┐šŻ¼ę▓─▄Ėą╩▄Ųõā×įĮĄ─ŲĮĘĆąį─▄ĪŻÅVĘ║▀mė├ė┌▄暊Īó┤aŅ^ĪóŠŲĄĻĪóÖCł÷ęį╝░Ė„ĘNąĶꬥŪĖ▀ū„śIĄ─ł÷║ŽĪŻ

łD7-6 ╠ūĖū╩ĮĖ▀┐šū„śIŲĮ┼_
Ż©6Ż®ī¦╝▄┼└╔²╩Į
▀mė├ė┌Ė▀īėĮ©ų■═Ōē”čbą▐Ż¼▓Ż┴¦─╗ē”╩®╣żĪóĮ©ų■═Ō▒Ē├µĄ─ŪÕØŹĄ╚ĪŻ
ŲĮ┼_į┌┐vÖMĘĮŽ“Š∙┐╔ūįė╔ĮM║Žūā╗»Ż¼┬ō║Ž╩╣ė├Ż¼ØMūŃĮ©ų■═Ō▒Ē├µ×ķŲĮ├µ║═Ū·├µĄ─ūā╗»Ż¼ūāŅl┐žųŲ▀\ąąŲĮĘĆŻ¼┼õéõĘ└│¼▌dčbų├Ż¼Ę└▓╗ŲĮ║Ō▌d║╔čbų├Ż¼ä“╦┘Ž▐╦┘Ų„Ż¼╩ųäėßīĘ┼čbų├Ż¼ęį╝░═¼▓Į▀\ąąčbų├Ż╗▓╔ė├▓╗╣╠Č©╗∙ĄAŻ¼▒Ńė┌ūāōQ╩®╣ż╬╗ų├Ż¼▀\▌öĘĮ▒Ń

łD7-7 ī¦╝▄┼└╔²╩Į╣żū„ŲĮ┼_
Ż©7Ż®ų®ųļ╩ĮĖ▀┐šū„śIŲĮ┼_
ŲĮ┼_▓╔ė├ų®ųļ═╚╩Įų¦ō╬ÖCśŗĪó╔ņ┐s╩Į▒█╝▄ĮYśŗŻ¼┐╔╩╣╦³į┌╩▄ŠųŽ▐Ą─┐šķg║═Ąž├µ╔Ž╣żū„Ż¼Å─Č°ėąą¦Ąžī”Į©ų■╬’▀MąąŠSūo▒ŻB╝░ŪÕØŹŻ¼ī”Ąž├µĄ─ē║┴”ĘŪ│ŻąĪ,ė╚Ųõ▀m║Žį┌Į©ų■╬’ā╚Ą─┤╔┤uĪó┤¾└Ē╩»Ą╚Ąž├µ╔Ž╣żū„ĪŻ
 
łD7-8 ų®ųļ╩Į╔ņ┐s▒█╝▄Ė▀┐šū„śIŲĮ┼_
|